Coordinate Systems
Field and Robot Coordinate Frame
PhotonVision follows the WPILib conventions for the robot and field coordinate systems, as defined here.
You define the camera to robot transform in the robot coordinate frame.
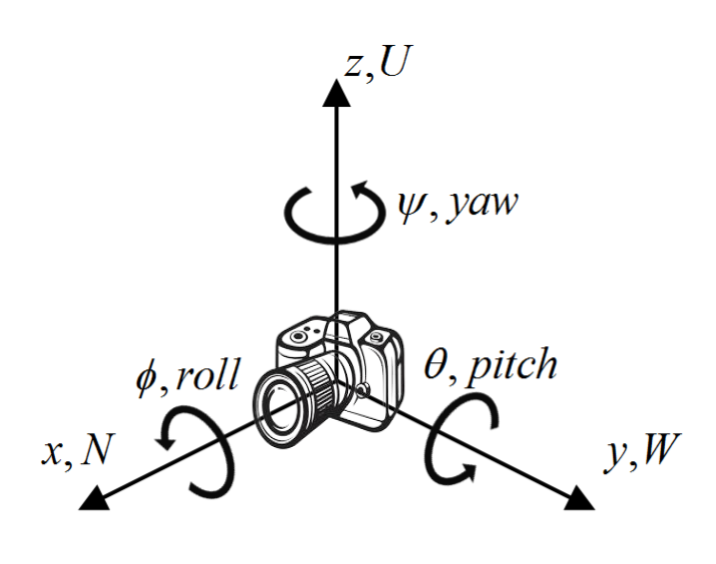
Camera Coordinate Frame
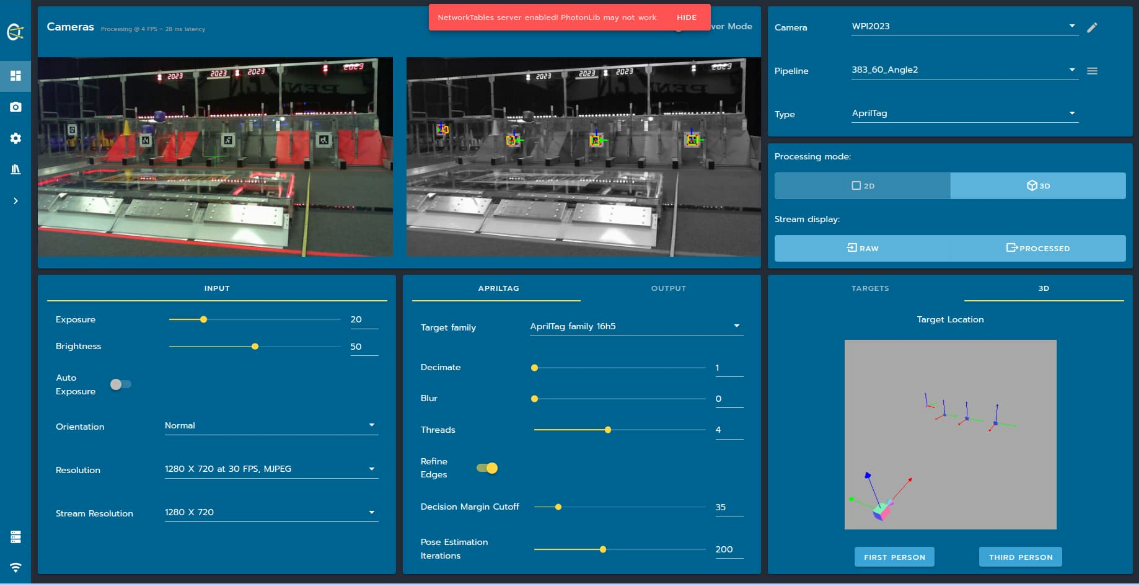
OpenCV by default uses x-left/y-down/z-out for camera transforms. PhotonVision applies a base rotation to this transformation to make robot to tag transforms more in line with the WPILib coordinate system. The x, y, and z axes are also shown in red, green, and blue in the 3D mini-map and targeting overlay in the UI.
The origin is the focal point of the camera lens
The x-axis points out of the camera
The y-axis points to the left
The z-axis points upwards
AprilTag Coordinate Frame
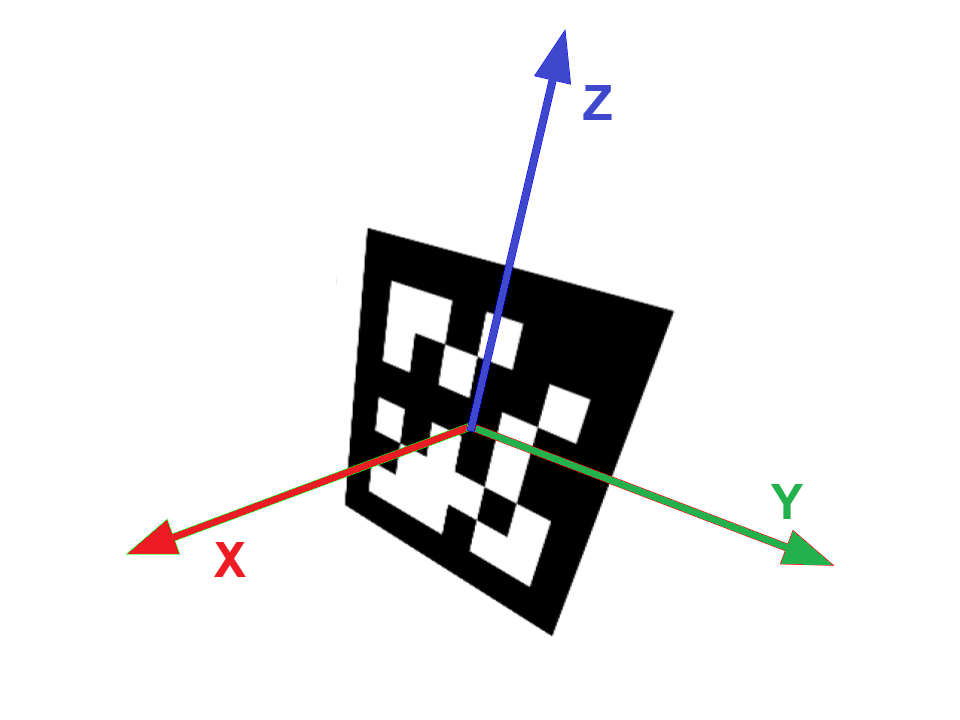
The AprilTag coordinate system is defined as follows, relative to the center of the AprilTag itself, and when viewing the tag as a robot would. Again, PhotonVision changes this coordinate system to be more in line with WPILib. This means that a robot facing a tag head-on would see a robot-to-tag transform with a translation only in x, and a rotation of 180 degrees about z. The tag coordinate system is also shown with x/y/z in red/green/blue in the UI target overlay and mini-map.
The origin is the center of the tag
The x-axis is normal to the plane the tag is printed on, pointing outward from the visible side of the tag.
The y-axis points to the right
The z-axis points upwards