Common Issues / Questions
This page will grow as needed in order to cover commonly seen issues by teams. If this page doesn’t help you and you need further assistance, feel free to Contact Us.
Known Issues
All known issues can be found on our GitHub page.
PS3Eye
Due to an issue with Linux kernels, the drivers for the PS3Eye are no longer supported. If you would still like to use the PS3Eye, you can downgrade your kernel with the following command: sudo CURL_CA_BUNDLE=/etc/ssl/certs/ca-certificates.crt rpi-update 866751bfd023e72bd96a8225cf567e03c334ecc4. Note: You must be connected to the internet to run the command.
LED Control
The logic for controlling LED mode when multiple cameras are connected is not fully fleshed out. In its current state, LED control is only enabled when a Pi Camera Module is not in driver mode—meaning a USB camera on its own is unable to control the LEDs.
For now, if you are using multiple cameras, it is recommended that teams set the value of the NetworkTables entry photonvision/ledMode from the robot code to control LED state.
Commonly Seen Issues
Networking Issues
Please refer to our comprehensive networking troubleshooting tips for debugging suggestions and possible causes.
Camera won’t show up
Try these steps to troubleshoot your camera connection.
If you are using a USB camera, it is possible your USB Camera isn’t supported by CSCore and therefore won’t work with PhotonVision.
Camera is consistently returning incorrect values when in 3D mode
Read the tips on the camera calibration page, follow the advice there, and redo the calibration.
Not getting data from PhotonLib
Ensure your coprocessor version and PhotonLib version match. This can be checked by the settings tab and examining the .json itself (respectively).
Ensure that you have your team number set properly.
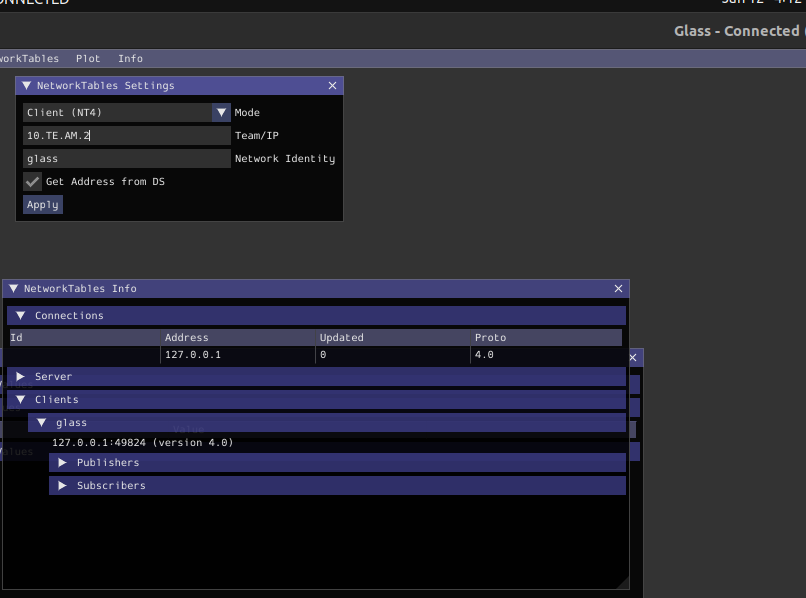
Use Glass to verify that PhotonVision has connected to the NetworkTables server served by your robot. With Glass connected in client mode to your RoboRIO, we expect to see “photonvision” listed under the Clients tab of the NetworkTables Info pane.
When creating a
PhotonCamerain code, does thecameraNameprovided match the name in the upper-right card of the web interface? Glass can be used to verify the RoboRIO is receiving NetworkTables data by inspecting thephotonvisionsubtable for your camera nickname.

Unable to download PhotonLib
Ensure all of your network firewalls are disabled and you aren’t on a school-network.
PhotonVision prompts for login on startup
This is normal. You don’t need to connect a display to your Raspberry Pi to use PhotonVision, just navigate to the relevant webpage (ex. photonvision.local:5800) in order to see the dashboard.
Raspberry Pi enters into boot looping state when using PhotonVision
This is most commonly seen when your Pi doesn’t have adequate power / is being undervolted. Ensure that your power supply is functioning properly.